

密集式智能仓储系统在充分利用空间、增加存储量等方面具有一定的优势,可以在现有厂房布局基本不变的情况下,通过利旧改造或新增设备实现自动化存储。不过,密集式智能仓储系统的作业效率相对于自动化高架库略有不足,尤其是要适应现有厂房布局也会对其效率产生影响。因此,如何通过调度及策略的优化进一步提升密集式智能仓储系统的效率备受关注,本文通过实际案例对此进行了分析研究。
密集式智能仓储系统可以充分利用空间,且其布置方式较为灵活,能够以较少的成本获得较高的预期效果,但其作业效率相对自动化立体库有较大的降低。要提高密集式智能仓储系统的整体能力与入出库效率,除了在设备选型与方案规划方面做充分考虑外,仓储的管理调度系统也需要进行合理优化。本文以某项目为实例,阐述一些优化的方法。
一、项目概况
项目类型为子母穿梭车(穿梭车结合穿梭板)型的密集式智能仓储系统,总体布局分为密集式存储区、入库区、出库区。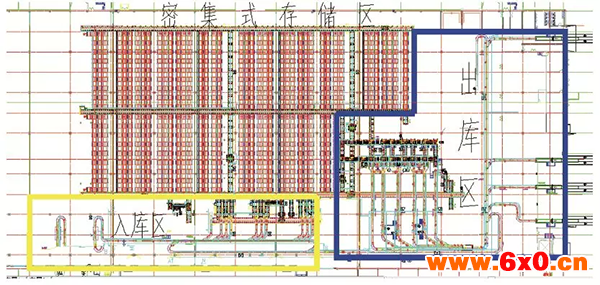
图1:总体布局
总体布局见图1,密集式货架布局见图2。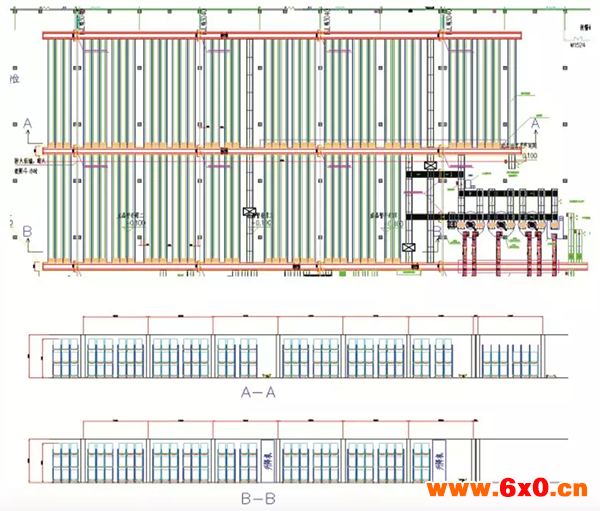
图2:密集式货架布局
其中,密集式存储区为三层货架设计,储位约4400个,共6套子母穿梭车系统,配合以升降机及输送设备,完成入出库作业。从生产线输送的成品通过入库分拣线送达码垛机器人处,机器人将成品码垛到托盘上,码盘完成以后,向仓储管理调度系统申请入库;系统调度输送机和子母穿梭车将托盘输送到指定货位入库;出库时,根据仓库管理调度系统下达的订单出库指令,子母穿梭车和输送机将托盘运送至出库区域的拆垛机器人,机器人将成品拆垛后,通过出库分拣线运送至出库月台,装车发货。
结合实际布局情况以及现场实测数据,按照传统的调度思路,平均出库一个托盘所需时间与机器人分拣的平均效率基本一致,约115秒/盘。在实际运行过程中,往往同一套子母车设备既有入库任务,同时还有空托盘以及实托盘的出库任务,再加上商品存储分布不均匀导致多订单出库任务集中到一套子母车设备上,使得出库速度无法满足机器人的分拣速度,致使机器人产生不必要的等待。在出库过程中一旦发生机器人等待情况,将导致无法达到规划设计的出库效率2500件/小时,经实测只能达到约1800件/小时。其瓶颈在于子母穿梭车系统出库的速度不能满足机器人拆垛的速度,进而导致整体出库效率无法满足系统设计的要求。
如何优化提高整个系统的能力?通过在现场不断观察调整,确定采用子母车分离调度算法以及出库策略调整两个方面进行。
二、子母车分离调度算法
原有的调度是将子母车考虑为一个整体,完成单一任务后再执行下一个任务。所谓子母车分离调度,是指母车和子车同时执行各自的任务,充分发挥设备能力,其前提条件为入库货位或者出库货位在同一巷道。以出库任务为例,前一个托盘,子车在母车上卸货完成以后,如果后续任务为同一巷道,则子车离开母车继续进入巷道搬运后续托盘,母车则运送前面托盘到达卸货站台,卸货完成后再回到原巷道接子车回归母车。其调度系统结构示意如图3。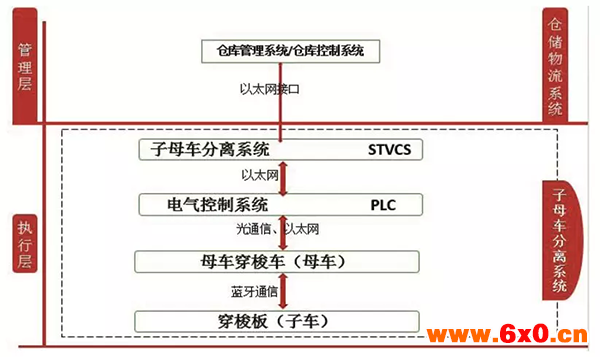
图3:调度系统结构示意
其难点在于对子母车分离的调度,以及分离以后,子车从离线状态再次回到在线状态,网络和信息的重连机制。由于子母车之间采用蓝牙通信,但其通信距离较短,在二者分离以后,通信处于中断状态,然后待二者回到同一巷道时,蓝牙通信需要在短时间内建立连接,同时,需要由穿梭车将连接信息上报给WCS。子母车在送货入库流程以及取货出库流程方面的调度思路如图4、图5所示。
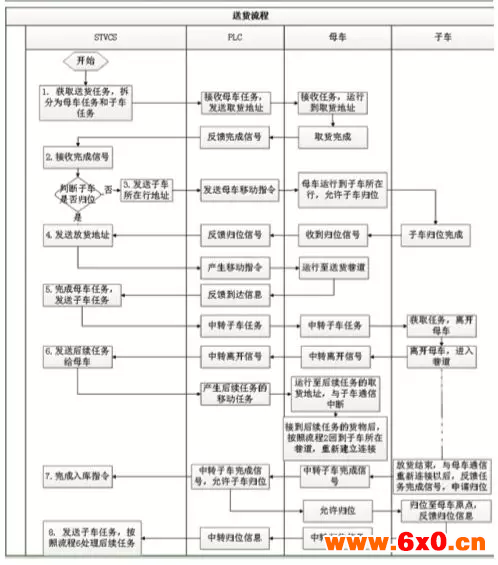
图4:送货入库流程
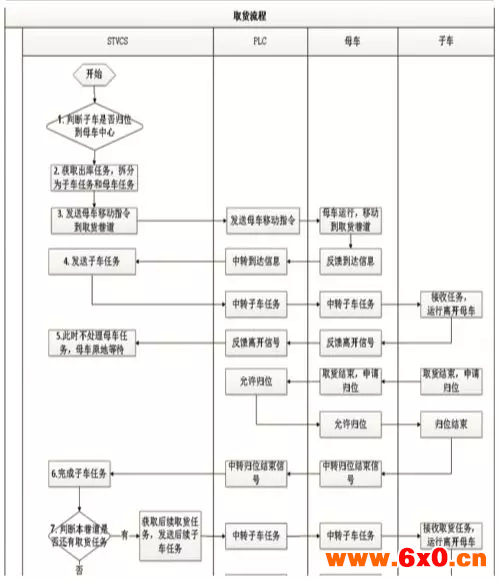
图5:取货出库流程
子母车分离调度功能提高了对子母穿梭车单机的利用率,将原有的一个设备拆分为两个设备独立运行,大大提高了系统的出库能力。但当系统运行出现以下方面情况时,还是会影响系统的整体出库能力:
1.如果同区域出库和入库任务同时交错运行时,则子母车无法分离,导致出库效率很低。
2.如果同时运行的两个出库任务出现在同一个区域时,先执行一个订单,则势必会影响另外一个订单的出库。如果保证两个订单均衡出库,则该区域的子母车无法分离,无法及时供应机器人拆垛。
3.出库拆垛处缓存数量有限,每个拆垛机器人处只有6个缓存工位。当缓存位已满时,WCS将会暂停调度出库,只有当缓存位出现空缺时,WCS会再次调度穿梭车继续执行出库任务,但当所调度的穿梭车正在执行其他订单任务,则会导致出库任务需要等待的情况,这样就会有较大可能性导致拆垛机器人完成缓存工位的拆跺后,后续出库的托盘还未到位,使拆垛机器人产生不必要的等待,进而影响整个系统的出库能力。
三、出库策略调整
为解决上述影响系统出库能力的问题,确保拆垛机器人有效工作时间达到zui大化,在调度系统方面又采取了如下出库策略:
1.多车同时作业以及同一套子母穿梭车出入库作业严格区分
仓库库区内部一共分为6个区域,共有6套子母车设备,由于设备异常以及货位分布等不确定因素,在仓库实际存储过程中,对于每种规格的产品不可能做到在6个区域均匀分布。因此,我们在出库运行波次时,通过人工介入的方式,依据实时情况选择出库区域,尽量做到6套子母车能够同时运行,或者说保证同时出库的3个订单不在同一个区域,根据库区内货物分布情况错开出入库在同一区的情况。
2.缩短前后订单的时间间隔,保证订单间无缝对接
同一个拆垛机器人处理的前后两个订单如果间隔时间长,也会影响出库效率。原有算法为上一个订单的全部成品装车完成后,才下发下一个订单。优化调度算法为,在前一个订单的zui后一个托盘上穿梭车以后,后一个订单的托盘出库任务会立即下发;这种调度模式有一定的概率会导致后面订单的托盘提前到达拆垛区域,故又通过WCS调度后续订单的托盘沿输送主线做环线运动,不进入机器人拆垛缓存区域。
3.提高出库拆垛缓存位数量
按照规划设计,出库机器人拆垛区域有3台机器人,每台机器人包括拆盘工位一共有6个缓存工位。原系统调度策略在出库到该机器人的托盘数量(包括在途)等于缓存工位时,WCS系统不会调度该订单的后续出库任务。在实际优化过程中,将缓存工位提高到8个,其中有2个是作为在线缓存,也进一步增加子母车分离的次数,一次性出多个托盘,保证出库拆垛机器人有足够的实托盘供给;对于多出的2个在线缓存托盘,WCS会将调度系统控制在输送主线上做环线运行,确保不影响其它实托盘运行至机器人缓存工位。
4.移库作业优化库区内货物分配情况
如前所述,关于不能保证入库均衡性存储的问题,就需要人工介入干预。在晚班时段,系统只进行入库作业而不进行出库作业,设备有空闲时间进行货位整理。在实际生产中会利用这个时间进行整理,尽量做到货物存储的均衡性。此调整有两方面的好处:一方面提高货位利用率;另一方面进行货位整理以后,保证了均衡存储,提高出库效率,满足客户发货及时性的要求。
经过以上调度方案的优化实施,现场也组织了专门的能力测试来验证,经过4天的测试,在保证正常入库需求的基础上,每天的出库效率分别为2545件/小时、2535件/小时、2557.5件/小时、2600件/小时,达到了合同约定的2500件/小时的能力要求,取得了客户的认可。
四、结语
近年来,由于土地成本上升,密集式智能仓储系统以其高密度存储、自动化作业正在成为仓储系统建设的趋势;但密集式智能仓储系统在节约空间的同时,出入库效率明显低于自动化高架库。通过本项目实际案例,在子母车分离调度以及整个物流系统调度策略上做了很好的优化,并取得了预期的效果,为后续密集式自动化仓储项目积累了相关经验。当然,密集式自动化存储的方式多种多样,企业应结合能力需求、投资预算等自身实际情况,来综合确定采用何种仓储模式,优化规划方案,以实现预期目标。








 QQ交流群
QQ交流群

