

研祥CAN-bus工业平板电脑拥有丰富的产品线,涵盖ARM和X86硬件架构,支持嵌入式操作系统(linux、andriod、wince)和桌面操作系统(winxp、win7),并且完全支持CAN标准报文格式和扩展报文格式,客户直接使用机器自带的CAN接口即可,无需外接CAN卡,极大的降低了客户设备成本,同时提高了系统的可靠性。
一、系统概述
雷达是利用电磁波来探测目标并测定其位置、速度等其它特征的电子设备,具有发现目标距离远、测定目标坐标速度快、全天候工作等特点。为了使雷达天线能控测空间各个方向上的目标,就必须使光束能大范围自由移动,实现扫描和追踪目标。天线座驾的机械轴随雷达运动控制系统的指令运动,天线的电轴始终对准目标,准确、快捷、稳定、可靠的捕捉到目标物,并反馈到监控台。
二、系统要求
1) 整个系统要求全天候工作,受振动、灰尘、潮气等恶劣环境影响较大
2) 系统精简,故障率低且排查容易,指令周期短,实时性强。
3) HMI数据处理能力强,通讯接口丰富,比如具备实时性好、纠错能力强的CAN 总线。
4) 数据保护和加密,系统崩溃可一键恢复。
三、系统描述
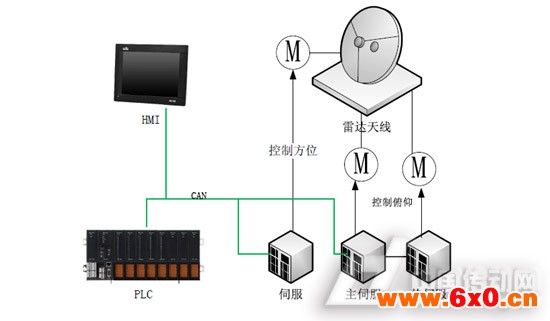
雷达天线运动模式分为俯仰运动和方位运动两种,俯仰是由两台主从伺服减速电机带动两根丝杆,再连接天线方位是一台伺服减速电机直接连接天线。使用时,俯仰先工作,把天线提升到大致80 度停下来,然后方位工作,不停的扫描空中目标。整套系统通过CANBUS连接,CAN总线具有实时性好,纠错能力强等特点。伺服控制器拥有标准CANBUS接口,通过CAN 总线连接到PLC控制器上,然后HMI通过自带的CAN 总线对PLC进行DI、DO、AI、AO 控制,另外,HMI还可以接受电机位置信号,对PLC代码参数进行修改,同时显示电机电流、温度、转速、限位状态等。

四、系统框图
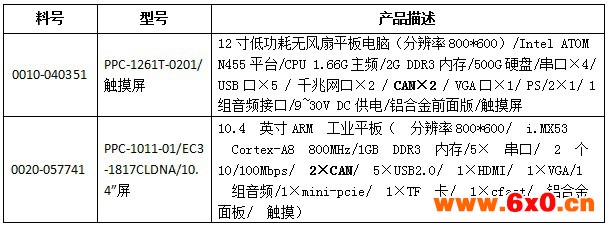
五、项目产品清单
六、总结
研祥CAN-bus工业平板电脑拥有丰富的产品线,涵盖ARM和X86硬件架构,支持嵌入式操作系统(linux、andriod、wince)和桌面操作系统(winxp、win7),并且完全支持CAN标准报文格式和扩展报文格式,客户直接使用机器自带的CAN接口即可,无需外接CAN卡,极大的降低了客户设备成本,同时提高了系统的可靠性。我们相信,凭借研祥工业平板电脑在车载领域的丰厚业绩和宝贵的技术沉淀,定能为客户创造更大的价值。









 QQ交流群
QQ交流群

