

1引言
目前,虽然在整个风力发电系统中,双馈型风力发电系统仍占主流地位,但是直驱型发电机组凭借其固有的优势已经开始越来越受到关注[1]。直驱型风力发电系统采用风轮直接驱动多极低速永磁同步发电机(pmsg)发电,然后通过功率变换电路将电能进行转换后并入电网,省去了传统双馈式风力发电系统中故障率较高的齿轮箱这一部件,系统效率大为提高,有效地抑制了噪声,提高了系统的运行可靠性,因而得到了市场青睐。
2直驱型风电机组变流器拓扑结构
低压系统中全功率变流器的两种拓扑结构最简形式如图1。
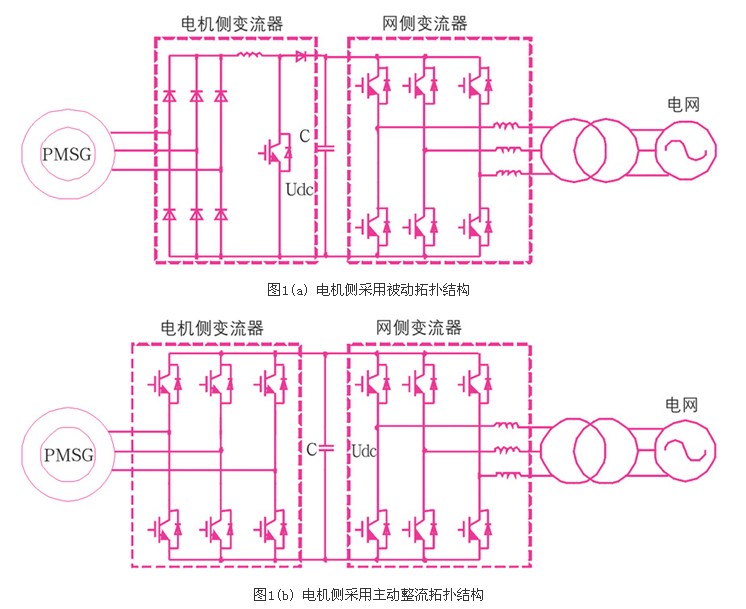
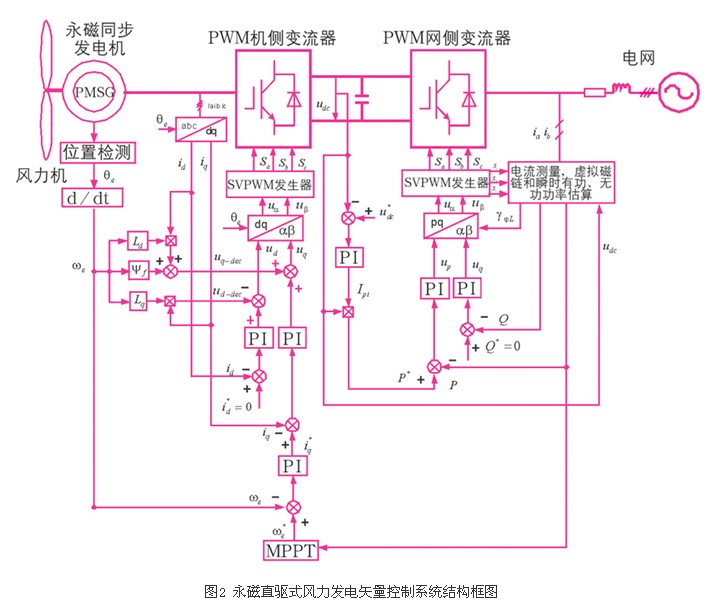
对于主动整流拓扑而言,三相电压型逆变器取代了不控整流和升压斩波单元,控制发电机负载转矩,从而实现对电机转速的调节。这种拓扑结构采用双pwm(pulsewidthmodulation)全功率变流器,能够实现对发电机的高性能控制,也避免了不控整流和升压斩波两级结构给系统增加的复杂性,减少了发电机的铜耗和铁耗,并可调节发电机功率因数为1,具有较好的发展前景。鉴于电机侧变流器与电网侧变流器控制策略的侧重点各有不同,本文提出了电机侧变流器和电网侧变流器分开控制的控制方法(系统控制框图如图2所示),可以实现对它的有效控制,从而产生高性能的动态特性。
3电机侧变流器控制策略
本文通过控制发电机组的转速来实现最大风能跟踪,使发电机转速能跟从不断变化的风速,从风中获取更多的能量:当风速在额定风速以下时,系统进行转速控制的目的是保证机组运行在最大风功率追踪状态下;当实际风速高于额定风速时,受机械强度、发电机容量和变频器容量等限制,必须降低风轮捕获的能量,使功率保持在额定值附近,此时桨距角控制需要起作用,以保证机组保持在额定功率附近。
3.1额定风速以下风力机最大功率跟踪算法(mppt)
风机输出的功率大小会随着转速的变化而变化。对任意一个风速,都有一个最优转速使得功率最大。因此,风机控制的目标是要控制转速使风机始终运行在输出功率最大点。当桨距角一定时,存在一个最优的叶尖速比λ使得风能利用系数cp最大,也就是使输出功率最大。根据公式,要实现风能的最大功率跟踪,则必须根据风速来调节发电机转速大小,从而维持最优叶尖速比。
永磁同步发电机的电磁转矩取决于电动机的定子电流,对于直驱风力发电系统,采用永磁同步发电机,没有增速机构,因此风力机在各种风速下的转速就对应发电机相应的转速,即ω=ωg,(ω是风机转速,ωg为发电机转速),因此要使风力机的转速时刻追随风速保持为该风速下的最优转速,就是使发电机的转子转速跟随风速并保持某风速下的最优转速。发电机转速控制方式需要先检测风速信号,再通过风速—最优转速的关系自寻优找到最优转速,将最优转速作为参考转速输入到电机驱动器中,通过速度闭环系统使发电机达到最优工作点。由于发电机的速度和电磁转矩有着直接的关系,因此可将力矩环节作为速度环节的内环进行设计。对于永磁电机不需要励磁电流,定子电流只产生转矩,在旋转坐标系下,永磁电机的电磁转矩te=1.5pψfiq只与q轴电流相关,而与d轴电流无关,所以力矩环节的控制可以转化为电流环节的控制。于是,只需通过控制q轴电流即可实现发电机转矩转速的控制。速度控制方式是以电流控制为内环,速度控制为外环的闭环控制系统。发电机侧变流器的主要作用是根据实际风速的变化,调节输出电压信号ug和电频率fe。根据永磁电机的矢量控制原理,通过对发电机转子电流矢量的相位和幅值进行控制即可达到调速的目的。从永磁电机的转矩公式可以看出,当永磁体的励磁磁链和直交轴电感确定以后,发电机的转矩便取决于定子电流的空间矢量ig,而ig的大小和相位又取决于id和iq,通过对这两个电流的控制就可以控制发电机的转矩。一定的转速和一定的转矩对应于一定的id和iq,通过对这两个电流的控制,使实际id和iq跟踪指令值i*d和i*q,便实现了发电机和速度的控制。
4电网侧变流器控制策略
一般电网侧变流器控制系统需要交流电压传感器、交流电流传感器、直流电压传感器来检测控制量和起保护作用,增加了系统成本,使得整流装置体积庞大,同时传感器信号丢失和噪声的干扰都有可能使系统性能降低。为此研究省略传感器控制策略很有必要。本文在传统svpwm方法的基础上采用虚拟磁链来计算角度,无需对交流电压信号进行检测,省去了交流电压传感器,降低了系统成本,减小了装置体积,简化了电路结构。而且对于电网干扰有较强的抑制作用,电网输入电流的畸变较小,系统具有更好的动、静态控制特性。
4.1虚拟磁链的概念
虚拟磁链的概念由虚拟电机引出,可将电网侧电源(图3中虚线部分)看作一个虚拟的交流“电机”,其中的电阻与电感可分别视为虚拟电机定子电阻和定子漏感。
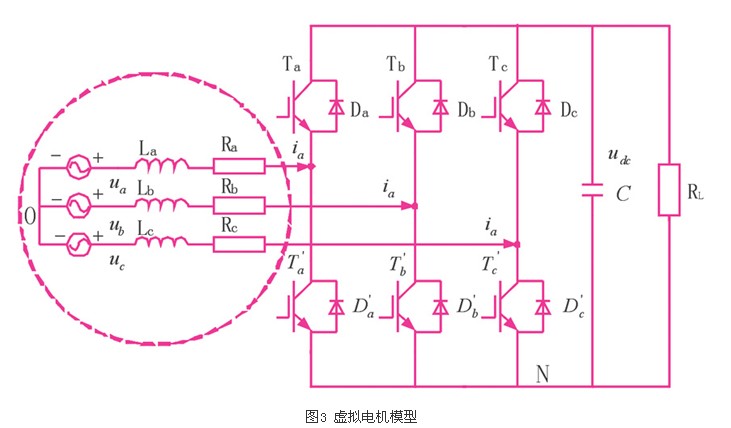
先设三相电网电压平衡,同时忽略进线电抗器和线路电阻r。此时αβ坐标系下的三相vsr的电压方程为:

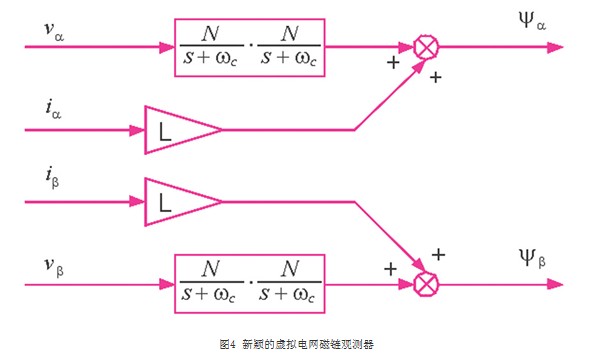
由式(3)可以看出在估计磁链时用到了积分环节。积分初值的问题会造成观测磁链的偏差。本文用两个一阶低通滤波器代替积分环节,消除了偏移,得到的虚拟磁链观测器如图4。
4.3瞬时功率的估计
用测得的线电流值和估计的磁链值来估算瞬时功率。在复数领域,瞬时功率可按下式计算:
p=re(ui*l)
q=im(uli*l)
i*l是il的共轭复数。
瞬时有功功率和无功功率可以表示为:
p=w(ψlαilβ-ψlβilα)
p=w(ψlαilα-ψlβilβ)
4.4引入虚拟磁链的svm-dpc控制框图
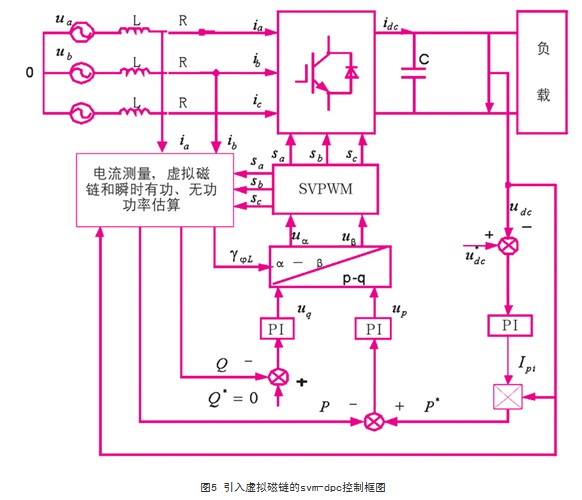
图5是引入虚拟磁链的svm-dpc控制框图。通过测量得到的电流信号和直流侧电压信号即可估算瞬时功率和磁链位置角。系统以直流输出电压为外环控制,输出电压与电压参考值的差值经由pi调节器调节得到参考电流值。将其与输出电压一同送入乘法器即可得到有功功率的参考值。同时,将无功功率参考值设为0,以保证整流器单位功率因数运行。内环则控制瞬时有功和无功功率,瞬时功率的计算值与参考值的比较偏差经pi控制器输出后,转化到α-β坐标系,将ua和uβ直接送入pwm调制模块来得到开关信号。
5仿真分析
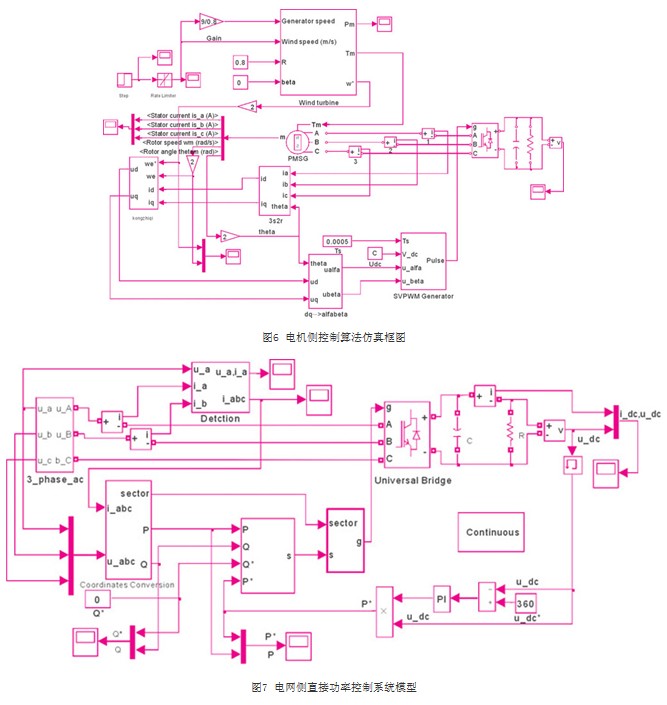
为验证上述控制方法,本文利用matlab/simulink软件搭建了基于直驱型风力发电机电机侧以及电网侧仿真模型,分别如图6和图7所示,主要仿真参数见附表所列,仿真结果如图8和图9所示。


永磁同步发电机参数为:额定转速n=750rad/min,rs=1.64ω;ld=0.01547h;lq=0.0258h;ψf=0.1848wb;pn=2;te=9.55n·m。
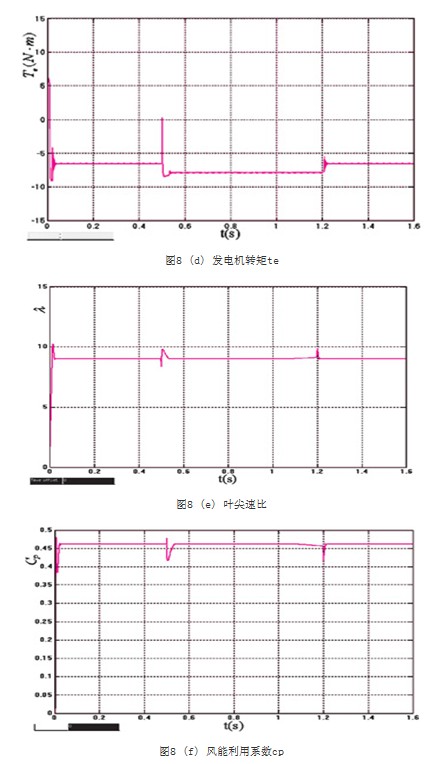
图8为风速在13m/s到14m/s阶跃变化时风速、发电机转速、风力机输出转矩、发电机转矩、叶尖速比和风能利用系数波形。随着风速的变化,d轴电流保持为零,q轴电流随之调节,叶尖速比保持最优λopt,风能利用系数维持最大值。仿真结果证明了控制的效果,体现了变速风力发电系统较恒速风电系统捕捉能量多且工作稳定的优点,验证了发电机侧的控制算法的可行性。实现了风能的最大功率跟踪,控制策略的稳态和动态性能得到验证。
图9为采用虚拟磁链矢量控制系统交流侧a相电压电流、直流电压、瞬时有功、瞬时无功的波形。仿真结果说明在无功给定q*=0时,交流侧电流波形接近正弦,电压电流同相,实现了单位功率因数整流运行。有功、无功功率具有较好的稳态特性,p的平均值稳定在给定值p*,q的平均值稳定在给定值0,系统实现了较好的控制性能。
6结束语
本文采用双pwm变流器作为直驱永磁同步风力发电机的并网电路,提出了一种电机侧变流器和电网侧变流器分开控制的控制策略。仿真结果验证了所提出控制策略的正确性:电机侧在额定风速以下时可以很好的通过追踪最佳叶尖速比来获取最大风能,并稳定直流侧电压;电网侧可以保持网侧功率因数运行,并且省去了交流电压传感器,拥有较好的动、静态性能。电机侧和电网侧各司其职,使得控制方法简单、有效。








 QQ交流群
QQ交流群

