

速度传感器
DSM

![]()
- 霍耳测量原理
- 测量范围 1 … 5000 Hz
- 输出信号电流方波信号
- 电源电压 4.5 … 20 V
- 防护等级 IP69K
特征
- 旋转方向识别
- 甚至能检测到低转速
- 特别为行走机械应用的苛刻要求而开发
- 汽车级质量
- 安装简单,无需设置工作
- 提供电流接口
产品说明
DSM1-10 霍尔效应速度传感器专为行走作业机械的苛刻使用条件而开发。传感器能接收到铁磁性齿轮或切削板件的速度信号。作为有源传感器,在接收这些信号时,它会发出一个具有恒定振幅且不受速度影响的信号。传感器不但具有检测旋转方向的优越性能,而且还具有额外的诊断功能,例如:
停机检测
‐
临界气隙
‐
临界安装位置
‐
应用示例
由于其紧凑、高强度的设计,该传感器适合集成在
用在获取轮速的车轮轴承中
‐
用在变速器或齿轮级中
‐
用在公交车、卡车和建筑机械上的风扇驱动装置中(7 至 20 kW)
‐
用在压路机和铺路机的振动驱动器中
‐
示例:
带 DSM 外啮合齿轮马达的轴向柱塞马达
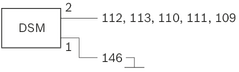
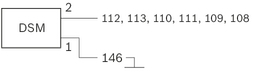
框图
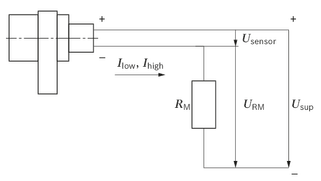
USensor
传感器工作电压
Usup
电源电压
URM
测量电阻的信号电压
Ilow, Ihigh
传感器电流
RM
测量电阻
信号传递使用双线电流接口。传感器提供电流信号。低电流(Ilow = 有源元件自身的电流)转换为低信号。高电流(IHigh =Ilow + ∆I;∆I = 来自与有源元件平行的路径的额外电流)转换为高电流。控制装置中接受到的来自测量电阻器的传感器 RM 测得的电流转换为电压信号。测定电路根据电压大小检测此信号是高信号还是低信号。
输出信号
DSM1-10 输出信号由 DSM1-10 测定电子装置产生的具有恒定振幅的方波信号组成。单个脉冲的长度提供有关旋转方向的信息和有关安装位置的错误提示。
测定电子装置产生一个高脉冲,该脉冲具有确定的长度,位于传感器内部速度信号的各边之后,因此,该高脉冲的长度由待传输的信息决定。例如,左旋转方向信息由 90 µs 长脉冲描述,而右旋转方向信息则由 180 µs 长脉冲描述。
为确保在有高速长脉冲时仍能输出转速信息,应始终在高脉冲之前留出一段低时间(预置低位)。这样,虽在高速时丢失了信号内的附加信息(低时间功能会切断脉冲),但在最高频率下却能可靠地输出转速信息(上游低时间 + 最短高脉冲)。
如果输出气隙保留信号,其他信号会被覆盖(此时,AR 是主导信号),也就是说,旋转方向信号 (DR) 或安装位置信号 (IP) 都不会输出。
信号形状
气隙保留 (AR) 和安装位置 (IP)
传感器对磁通量的变化做出反应。如果齿轮和传感器之间的气隙太大,则可能对信号输出产生不良影响:
极限量程限度通量改变
小于限度通量改变 针对磁流量变化,信号丢失可能会发生。
近程近值通量改变
小于近值通量改变 针对磁流量变化,输出 AR 位。
安装位置安装值通量改变
小于安装通量改变 针对磁流量变化,输出 IP 位。
转速增加时的行为
转速增加时,在信号按计划长度输出之前检测到齿轮的下一个表面。在此类情况中,信号缩短并会被每个边之后的零时 (45 μs) 覆盖。这确保了脉冲频率和转速能始终得到正确传输。这样失去旋转方向信息并不重要,因为此时由于转速高而不会出现旋转方向变化。如果转速降低,(如减速直至旋转方向改变),信号会再次全部输出,并将检测到旋转方向的变化。
停机时的行为
一秒钟内检测不到速度信号之后的
传感器信号:
说明
当车辆停机时,传感器每 0.7 s 输出长度为 1.44 ms 的脉冲。只要未检测到速度信号,这些脉冲也会在欠电压后输出。
初始化也在停机状态下进行。初始化持续 255 至 345 µs。在此期间无法检测到信号变化。
退出停机状态和/或起动时的信号
在确定输出值(频率、旋转方向等)时,可能需要一定数量的脉冲以确保提供适当的信息。
当起步时或在欠电压状态之后,传感器先处于非校准状态(信号不进行偏移补偿)。同时在此阶段,传感器在第二个信号脉冲开始时提供一个正确的频率信号,此外,在典型条件下,传感器还会提供一个具有第三个信号脉冲的正确旋转方向信号。正确输出旋转方向最多需要七个齿/边,具体取决于安装位置。在此模式中,磁输入信号的最小值和最大值用作触发点。
在未校准模式下的信号输出期间,由传感器执行信号校准(偏移补偿)。随后,传感器会自动切换至已校准模式。从这一时刻起,将磁输入信号的零交叉点用作触发点。切换到已校准模式时,在极少数情况下,输出信号可能发生相移(最大值为 –90° 和/或 +90°)。
在未校准模式下输出的信号脉冲数量最多不超过五个。
信号公差
以下持续时间(最小值、标称值、最大值)由传感器内部组件在各种情况下的容差决定:
脉冲名称
脉冲宽度 t脉冲
最小
标称
最大
预置位低
tVorbit
μs
37
45
53
气隙保留
tAR
μs
37
45
53
逆时针旋转方向
tDR-ccw
μs
74
90
106
顺时针旋转
tDR-cw
μs
149
180
211
逆时针旋转和安装位置信号1)
tDR-ccw/IP
μs
298
360
422
顺时针和安装位置信号1)
tDR-cw/IP
μs
597
720
843
停机
STOP
tPuls-Stop
μs
1194
1440
1685
停机检测
tStop
ms
611
737
863
1) 输出脉冲 DR-ccw/IP 和/或 DR-cw/IP 的最大信号频率大约为 117 Hz。高于此频率,此脉冲则由较短的 DR-ccw 和/或 DR-cw 更换。 振动
停机时,编码轮中的振动可能产生传感器假信号。
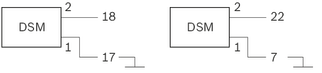
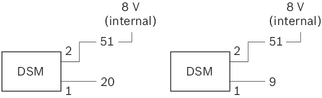
控制装置应用
力士乐 BODAS 控制器的应用
可使用以下 BODAS 控制装置读取 DSM1-10:21、22、30 和 31 RC 系列。
注意:
必须考虑所用的 BODAS RC 控制装置的电流样本。
RC2-2/21
2 路输入
RCE12-4/22
2 inputs
RC28-14/30, RC20-10/30, RC12-10/30
5 路输入
RC36-20/30
6 路输入
RC10-10/31
6 路输入
与其他控制装置一同使用
基本用法电流 I 以脉冲形式提供传感器信息(详细信息参见“输出信号”一章),其低等级和高等级如下:
I
最小
标称
最大
ILow
mA
5.9
7
8.4
IHigh
mA
11.8
14
16.8
最小脉冲宽度为 52 µs。这一宽度相当于 10 kHz 的频率。
要中断信号,必须确保在 30 kHz 的输入频率下,信号(经过存在的任何低通滤波器之后)仍然具有足够的电压差 (ΔV),以用于测定。
电阻器 R 会在 RC 控制装置进行频率输入时产生一个电压。
例如,当 R = 200 Ω 时会读到以下电压:
U输入
(R = 200 Ω)
最小
标称
最大
ULow
V
1.18
1.4
1.68
UHigh
V
2.36
2.8
3.36
要安装的电阻器 R 必须根据以下原则进行选择:
在控制装置具有足够的用于内部信号测定的电压差。
‐
电阻器 R 的最大电压不会太高(适合传感器电源),使传感器插脚上始终至少有 4.5 V 的电压。
‐
如果这些条件均满足并且控制装置内部有信号,则可确定传感器的信息。
转速
由于 DSM 可以检测到每个轮齿的两侧,实际的齿轮转速差通过以下公式确定
fWheels = fread / 2
速度、临界气隙、停机
为确定此信息,必须测量脉冲长度。例如,可通过在控制装置内测量脉冲的开始时间和结束时间来实现。
然而,转速始终可通过频率读取而无需测定。但应始终考虑到停机时的行为(1.44 ms/0.7 s)。可能检测到脉冲过长 (1.44 ms)。
类型代码
01
02
03
DSM
1
/
10
类型
01
霍尔速度传感器(行走机械应用)
DSM
型号
02
1
系列
03
10
可用的型号
类型
材料 号
DSM1-10
R917000301


欢迎光顾 苏 州 伊 洛 自 动 化 科 技 有 限 公 司 !
如有需要,请咨询 苏州伊洛自动化科技有限公司 客服。
苏州伊洛自动化科技有限公司竭诚为您服务!
创新 推进 变革 卓越








 QQ交流群
QQ交流群

