

引言
随着科学技术的发展,人类在微电子、计算机、电力电子技术和电机制造等诸多领域取得了巨大进步,并直接推动了伺服控制技术的飞速发展和广泛应用。诸如在各种数控设备、工业机器人、大规模集成电路制造、交通运输、载人宇宙飞船、电动工具以及家用电器等领域的应用都日益广泛。本文提出了一种基于DSP和功率模块的电机伺服控制系统设计方案。
20世纪90年代末,随着数字信号处理技术及超大规模集成电路的飞速发展,出现了一些高性能、低成本的DSP芯片,它将DSP核和用于控制的外设、大容量的片上存储器件集成在单一的芯片上,可以实时的执行一些高精度的复杂控制算法,减少传感器采样信号到控制命令的输出之间的延时,改善控制中的动态行为,片上具有的通讯机制可以更容易的实现与其他系统间的信息交互等,这些为电机控制系统的设计注入了新的活力。DSP的出现为设计具有开放式结构和网络控制功能的高性能的片上驱动控制系统提供了可能,是运动控制系统实现技术的发展方向。
机器人是近年来发展起来的一门综合学科,它集中了机械工程、电子工程、计算机
工程、仿生学、自动控制工程以及人工智能等众多学科的最新科研成果,代表了机电一
体化的最高成就,是目前科技发展最活跃的领域之一。目前,机器人技术已经取得了
很大的发展,产生了各种各样的机器人,如工业机器人,爬壁机器人,排爆机器人,水
下机器人,它们都已经在生产和生活中得到了广泛的应用,发挥了巨大的作用。行走机器人是靠安置在髋关节和膝关节处的电机来提供驱动力矩,在这个系统中,由于人的行走是一个复杂的、周期性往复的过程,电机需要频繁的起停、制动和正反转,同时需要对电机的速度和位置进行伺服控制,这对硬件系统提出了很高的要求。
1伺服控制系统
伺服系统是输出量以一定精度跟踪输入量变化的自动化控制系统。作为闭环自动控制系统的位置随动系统,它在生产过程和运动对象的控制、定位、瞄准、跟踪、信号传递和接收等装置中都占有显著的地位,现已成为各种调节系统的重要组成部分。
一个典型的DSP闭环控制系统如图1所示,基本上由三个模块组成:控制器、被控对象和传感器。控制器根据下达的参考指令与由传感器测得的反馈信号比较,所产生的误差再经过控制算法计算出适当的修正信号送给被控对象。其中控制器的主要目的就在于根据控制命令与反馈信号产生适当的修正信号而使系统有最佳的反应,而这个过程主要是完成控制算法的执行,可以用模拟、数字或混合的方式完成。
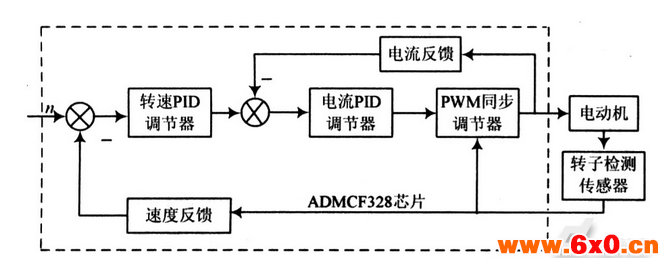
图1DSP闭环控制系统框图
近代控制理论采用的各种控制方法,如适应控制、模糊控制、神经网控制、鲁棒控制等,均可用来进行控制系统设计。控制算法多种多样,但基本上都是由数学方程式组成再加上一些流程控制命令如if…then、go…to等,而查表(TableLook-up)有时也是必需的,所以控制处理器就在于如何运用软、硬件技术实现控制算法。
2DSP在控制系统中的应用
为了能对电机进行速度、位置和电流的控制,同时也能够与上位机进行通信,设计了下面的关节伺服系统控制框图2所示,主要包括电机、谐波减速器、光电编码器、控制板、驱动板,它们组成一个有机的整体,共同实现电机伺服控制和助力功能。控制板实现电机的闭环控制和通信,驱动板进行功率放大,驱动电机运转。
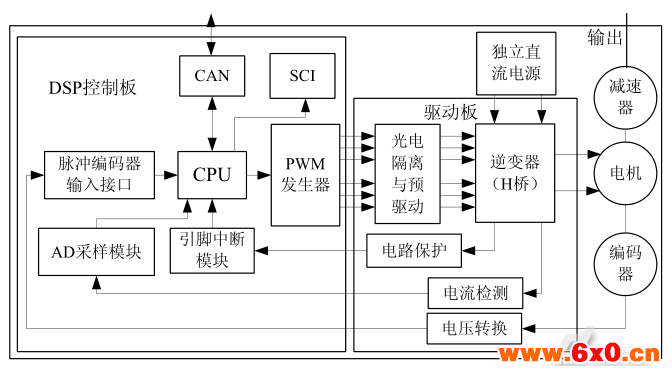
图2伺服系统控制框图
2.1DSP的总线模块
为了能够与上位机进行通信,驱动系统使用了DSP的CAN总线模块,该模块属于增强型eCAN总线模块。
设计时采用了标准CAN控制器(SCC)模式,只使用了32个邮箱中的前15个邮箱,不使用定时邮递功能。由于此关节伺服单元既要接收消息,又要发送消息,需要把这些邮箱配置成接收邮箱和发送邮箱,不进行接收滤波。通信波特率配置成1M/s。
2.2DSP事件管理器模块
此模块为电机控制用模块,在DSP中有两个事件管理EVA和EVB,它们都包括通用定时器、比较单元、捕获单元、PWM逻辑电路、正交编码脉冲电路以及中断逻辑电路等。面向优化的外设单元和高性能DSP内核结合,可以为所有电机类型提供高速、高效和全变速的先进控制技术。
每个事件管理器模块可以同时产生8路脉宽调制(PWM)信号,包括3对由16位全比较单元产生的死区可编程CMP/PWM信号和由16位通用定时器比较器产生的2路独立的PWM信号。通过设置不同工作方式,可选择输出非对称PWM波、对称PWM波或8个空间矢量的PWM波。可以根据需要直接改变PWM输出频率;可以在PWM周期内或周期结束后改变PWM脉宽;所具有的自动装载比较和周期寄存器可以减少CPU的开销。
在设计中,使用了事件管理器A中的全比较单元来产生带有死区保护的非对称PWM波,通过该PWM波来控制H桥电路中6个N沟道MOSFET晶体管的通断。利用了捕获单元中的CAP1/QEP1和CAP2/QEP2组成的正交编码脉冲(QEP)电路来对光电编码器产生的正交编码脉冲进行计数,来计算速度和位置。利用了PDPINTx引脚产生的中断来对电路进行保护。利用了ADC模块来采集H桥电路的相电流,实现电流环的闭环控制。
3功率驱动模块
在控制系统中,控制信号不能直接驱动执行装置——电动机,因为它不能提供电动机运行所需要的足够大的功率。控制信号必须通过功率放大器件才能驱动电动机。可以说,功率放大器件把具有固定电压的电源变成了由控制信号控制的能源,电压、电流或其他参数随控制信号变化而变化。伺服系统中应用最广的直流功率放大器有三种:线性(比例式)功率放大器、开关式功率放大器和晶闸管功率放大器。其中的开关功率放大器是通过脉宽调制变换器进行调制的,称为PWM调制方法。
3.1PWM调速原理
PWM驱动是利用大功率晶体管的开关特性来调制直流电源的固定电压,按一个固定的频率来接通和断开,并根据需要来改变一个周期内“接通”与“断开”时间的长短,通过改变伺服电动机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。如图3所示为PWM控制原理图。
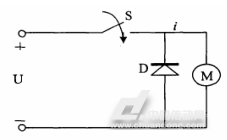
图3PWM控制原理图
3.2电流检测电路
电机的定子三相电机的检测采用IR公司生产的一款在电机控制器中检测相电流的芯片IR2277。该芯片具有与DSP同步的信号端子。定子电流由芯片检测,输出到DSP的AD转换器,检测到其中两相的电流,从而获得定子三相电流的信息。如图所示为电机控制系统框图。
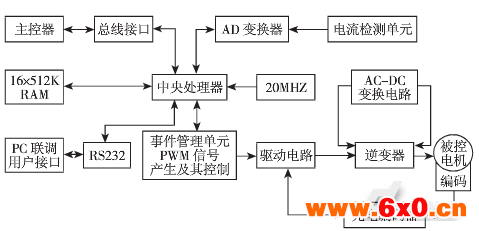
图4电机控制系统框图
3.3速度检测电路
采用增量式光电编码器检测转速。它输出两个相位差90度的方波信号A和B,及非信号PA、PB和零脉冲PZ信号。控制系统中利用事件管理器的正交编码单元对光电编码器进行检测,A、B分别与正交解码脉冲单元的两个通道QEP1和QEP2相连。正交解码脉冲单元QEP具有方向检测功能,它的方向检测逻辑辨明两个序列中哪一个是先导序列,接着可以产生方向信号作为所选定时器的方向输入。注意两列正交输入脉冲的两个边沿都被正交解码脉冲单元计数,因此产生的时钟频率是每个输入序列的4倍。
4结论
本系统硬件上采用DSP的控制结构,电流设计简单、紧凑,能够满足系统矢量控制要求;同时全数字化的控制能使系统在控制精度、功能和抗干扰能力上都有很大提高。从典型闭环控制系统的控制算法上分析,模拟电路难以实现复杂的控制算法,行走机器人对驱动统的要求比较高,因此选用了基于DSP的全数字电机控制系统,所采用的芯片的运算速度快,位数高,片上存储器容量大,具有专门的电机控制模块和CAN总线通信功能,具有A/D转换模块,很好地满足了控制要求。









 QQ交流群
QQ交流群

